Teorem o radnoj snazi o kinetičkoj energiji. Referat
Skalarna vrijednost T, jednaka zbroju kinetičke energije svih točaka sustava naziva se kinetička energija sustava.
Kinetička energija karakteristika je translacijskog i rotacijskog kretanja sustava. Na njegovu promjenu utječe djelovanje vanjskih sila, a budući da je skalar, ne ovisi o smjeru kretanja dijelova sustava.
Pronađimo kinetičku energiju za različite slučajeve kretanja:
1.Translacijsko gibanje
Brzine svih točaka sustava jednake su brzini središta mase. Zatim
Kinetička energija sustava u translacijskom gibanju jednaka je polovici umnoška mase sustava na kvadrat brzine središta mase.
2. Rotacijsko kretanje(slika 77)
Brzina bilo koje točke tijela :. Zatim
![]()
ili pomoću formule (15.3.1):
![]()
Kinetička energija tijela tijekom rotacije jednaka je polovici umnoška momenta inercije tijela u odnosu na os rotacije na kvadrat njegove kutne brzine.
3. Ravno-paralelno kretanje
S određenim gibanjem, kinetička energija je zbroj energije translacijskih i rotacijskih kretnji
Opći slučaj kretanja daje formulu za izračunavanje kinetička energija slično ovom drugom.
Definiciju rada i snage dali smo u stavku 3. poglavlja 14. Ovdje ćemo razmotriti primjere izračunavanja rada i snage sila koje djeluju na mehanički sustav.
1.Djelo gravitacije... Neka su koordinate početnog i konačnog položaja točke k tijela. Rad sile teže koji djeluje na ovu česticu težine bit će ![]() ... Tada je kompletan posao sljedeći:
... Tada je kompletan posao sljedeći:
gdje je P težina sustava materijalnih točaka, okomito pomicanje težišta C.
2. Rad sila primijenjenih na rotirajuće tijelo.
Prema relaciji (14.3.1), može se napisati, ali ds prema slici 74, zbog svoje beskonačne malenosti, može se predstaviti u obliku ![]() - beskonačno mali kut rotacije tijela. Zatim
- beskonačno mali kut rotacije tijela. Zatim
Količina ![]() naziva zakretni moment.
naziva zakretni moment.
Formula (19.1.6) se može prepisati kao
Elementarni rad jednak je umnošku zakretnog momenta i elementarne rotacije.
Kad se okrenemo prema konačnom kutu, imamo:

Ako je moment konstantan, tada
a snaga se određuje iz relacije (14.3.5)
kao produkt okretnog momenta i kutne brzine tijela.
Teorem o promjeni kinetičke energije dokazan za točku (§ 14.4) vrijedit će za bilo koju točku sustava

Sastavljajući takve jednadžbe za sve točke sustava i dodajući ih pojam po pojam, dobivamo:

ili, prema (19.1.1):
što je izraz teorema o kinetičkoj energiji sustava u diferencijalnom obliku.
Integriranjem (19.2.2) dobivamo:
Teorem o promjeni kinetičke energije u konačnom obliku: promjena kinetičke energije sustava s nekim njegovim konačnim pomakom jednaka je zbroju rada na tom pomaku svih vanjskih i unutarnjih sila primijenjenih na sustav .
Naglasimo da unutarnje sile nisu isključene. Za nepromjenjivi sustav zbroj rada svih unutarnjih sila je nula i
Ako se ograničenja nametnuta sustavu s vremenom ne promijene, tada se sile, vanjske i unutarnje, mogu podijeliti na aktivne i reakcije ograničenja, pa se jednadžba (19.2.2) sada može napisati:
U dinamici se uvodi takav pojam kao "idealan" mehanički sustav. To je takav sustav, prisutnost veza u kojem ne utječe na promjenu kinetičke energije, tj
Takve veze, koje se ne mijenjaju s vremenom, a zbroj njihovog rada na elementarnom pomaku jednak je nuli, nazivaju se idealne, a jednadžba (19.2.5) će biti napisana:
Potencijalna energija materijalne točke u danom položaju M naziva se skalarna veličina P, jednaka radu koji će sile polja proizvesti kada se točka pomakne iz položaja M u nulu
P = A (mo) (19.3.1)
Potencijalna energija ovisi o položaju točke M, odnosno o njezinim koordinatama
P = P (x, y, z) (19.3.2)
Objasnimo ovdje da je polje sila dio prostornog volumena u čijoj svakoj točki sila određena veličinom i smjerom djeluje na česticu i ovisi o položaju čestice, odnosno o koordinatama x, y , z. Na primjer, gravitacijsko polje Zemlje.
Zove se funkcija U koordinata, čija je razlika jednaka radu funkcija napajanja... Polje sila za koje postoji funkcija sile naziva se polje potencijalne sile, a sile koje djeluju u ovom polju su potencijalne sile.
Neka se nulte točke za dvije funkcije jakosti (x, y, z) i U (x, y, z) podudaraju.
Formulom (14.3.5) dobivamo, tj. dA = dU (x, y, z) i

gdje je U vrijednost funkcije sile u točki M. Dakle
P (x, y, z) = -U (x, y, z) (19.3.5)
Potencijalna energija u bilo kojoj točki polja sile jednaka je vrijednosti funkcije sile u ovoj točki, uzeta sa suprotnim predznakom.
To jest, kada se razmatraju svojstva polja sile, umjesto funkcije sile, može se razmotriti potencijalna energija, a osobito će se jednadžba (19.3.3) prepisati kao
Rad potencijalne sile jednak je razlici u vrijednostima potencijalne energije pokretne točke u početnom i krajnjem položaju.
Konkretno, djelo gravitacije:
Neka sve sile koje djeluju na sustav budu potencijalne. Tada je za svaku točku k sustava rad jednak
Tada će postojati za sve sile, i vanjske i unutarnje
gdje je potencijalna energija cijelog sustava.
Zamjenjujemo ove sume u izraz za kinetičku energiju (19.2.3):
ili na kraju:
Pri kretanju pod djelovanjem potencijalnih sila zbroj kinetičke i potencijalne energije sustava u svakom njegovom položaju ostaje konstantan. Ovo je zakon očuvanja mehaničke energije.
Opterećenje mase 1 kg vrši slobodne vibracije prema zakonu x = 0,1sinl0t. Koeficijent krutosti opruge c = 100 N / m. Odredite ukupnu mehaničku energiju opterećenja pri x = 0,05 m, ako je pri x = 0 potencijalna energija nula  . (0,5)
. (0,5)
Opterećenje mase m = 4 kg, koje pada, pomoću navoja rotira cilindar polumjera R = 0,4 m. Moment inercije cilindra u odnosu na os rotacije I = 0,2. Odrediti kinetičku energiju sustava tijela u trenutku kada je brzina opterećenja v = 2m / s  . (10,5)
. (10,5)
Počnimo s definicijom. Raditi A snage Ž pri kretanju NS tijelo na koje se primjenjuje definirano je kao točkasti proizvod vektora Ž i NS .
A =F x = Fxcosα.(2.9.1)
Gdje α - kut između pravaca sile i kretanja.
Sada nam je potreban izraz (1.6 a), koji se dobiva ravnomjerno ubrzanim kretanjem. No donijet ćemo univerzalni zaključak koji se naziva teorem o kinetičkoj energiji. Dakle, prepisujemo jednakost (1.6 a)
a x=(V. 2 –V. 0 2)/2.
Pomnožimo obje strane jednakosti s masom čestice, dobijemo
Fx= m (V 2 –V 0 2) / 2.
Konačno
A = m V 2/2 - m V 0 2/2. (2.9.1)
Količina E=m V 2/2 naziva se kinetička energija čestice.
Navikli ste na činjenicu da u geometriji teoremi imaju svoju usmenu formulaciju. Kako bismo bili u skladu s tom tradicijom, predstavljamo teorem o kinetičkoj energiji u obliku teksta.
Promjena kinetičke energije tijela jednaka je radu svih sila koje na njega djeluju.
Ovaj je teorem univerzalne prirode, odnosno vrijedi za bilo koju vrstu gibanja. Međutim, njegov točan dokaz povezan je s upotrebom integralnog računa. Stoga ga izostavljamo.
Razmotrimo primjer kretanja tijela u gravitacijskom polju. Rad gravitacije ne ovisi o vrsti putanje koja povezuje početnu i završnu točku, već je određena samo razlikom u visinama u početnom i krajnjem položaju:
A = mg ( h 1 –h 2). (2.9.2)
Uzmimo neku točku gravitacijskog polja kao ishodište i razmotrimo rad gravitacije kada se čestica pomakne u tu točku s druge proizvoljne točke R nalazi na visini h... Ovaj rad jednak je mgh i naziva se potencijalna energija E n čestica u točki R:
E n = mgh(2.9.3)
Sada transformiramo jednakost (2.9.1), mehanički teorem o kinetičkoj energiji poprima oblik
A = m V 2/2 - m V 0 2/2 = E n1 - E n2. (2.9.4)
m V 2/2 + E n2 = m V 0 2/2 + E n1.
U ovoj jednakosti s lijeve strane nalazi se zbroj kinetičke i potencijalne energije na krajnjoj točki putanje, a s desne strane u početnoj.
Ta se količina naziva ukupna mehanička energija. Označit ćemo ga E.
E=E do + E NS.
Došli smo do zakona očuvanja ukupne energije: u zatvorenom sustavu, ukupna energija se čuva.
Međutim, valja istaknuti jednu stvar. Dok smo razmatrali primjer tzv konzervativne snage... Ove sile ovise samo o položaju u prostoru. A rad koji takve sile izvršavaju pri pomicanju tijela iz jednog položaja u drugi ovisi samo o ta dva položaja i ne ovisi o putu. Rad konzervativne sile mehanički je reverzibilan, odnosno mijenja svoj znak kada se tijelo vrati u prvobitni položaj. Gravitacija je konzervativna sila. U budućnosti ćemo se upoznati s drugim vrstama konzervativnih sila, na primjer, sa silom elektrostatičke interakcije.
Ali u prirodi postoje nekonzervativne snage... Na primjer, sila trenja klizanja. Što je putanja čestice veća, to više posla obavlja sila trenja klizanja koja djeluje na tu česticu. Osim toga, rad sile trenja klizanja uvijek je negativan, odnosno takva sila ne može "vratiti" energiju.
Naravno, za zatvorene sustave ukupna se energija čuva. No, za većinu mehaničkih zadataka to je važnije poseban slučaj zakon očuvanja energije, naime zakon očuvanja ukupne mehaničke energije. Evo njegove formulacije.
Ako na tijelo djeluju samo konzervativne sile, tada se njegova ukupna mehanička energija, definirana kao zbroj kinetičke i potencijalne energije, čuva.
U nastavku slijede još dvije važne jednakosti. Kao i uvijek, zaključak ćemo zamijeniti jednostavnom demonstracijom određenog slučaja gravitacijskog polja. No oblik tih jednakosti vrijedit će za sve konzervativne snage.
Donosimo jednakost (2.9.4) u oblik
A = F∆x = E n1 - E n2 = - ( E n.con - E a.p.) = - ∆U.
Ovdje smo pogledali posao A kada se tijelo pomakne na udaljenost ∆ x. Vrijednost ∆U, jednaka razlici između konačne i početne potencijalne energije, naziva se promjena potencijalne energije. I rezultirajuća jednakost zaslužuje zasebni redak i poseban broj. Požurimo mu to dodijeliti:
A =- ∆U (2.9.5)
Odavde slijedi matematička veza između sile i potencijalne energije:
Ž= - ∆U / ∆ x(2.9.6)
U općem slučaju, koja nije povezana s gravitacijskim poljem, jednakost (2.9.6) je najjednostavnija diferencijalna jednadžba
F = - dU / dx.
Razmotrimo posljednji primjer bez dokaza. Gravitacijska sila opisana je zakonom gravitacije F (r) = GmM / r2 i konzervativan je. Izraz potencijalne energije gravitacijskog polja je:
U (r) = –GmM / r.
Autor: – Pogledajmo jednostavan slučaj. Tijelo mase m, smješteno na vodoravnoj ravnini, djeluje na tijelo mase m neko vrijeme T horizontalna sila Ž... Nema trenja. Što je djelo sile Ž?
Student: – Tijekom T tijelo će se pomaknuti na udaljenost S = na 2/2, gdje a=Ž/ m. Stoga je traženi posao A=Ž S = Ž 2 T 2 / (2m).
Autor: Sve je točno ako pretpostavimo da je tijelo mirovalo prije nego što je sila počela djelovati na njega. Malo zakomplicirajmo zadatak. Neka se tijelo giba pravocrtno i jednolično s određenom brzinom V 0, ko-usmjerenom s vanjskom silom, prije nego što sila počne djelovati. Koliki je sada posao T?
Student: – Za izračun pomaka uzet ću općenitiju formulu S = V 0 T+na 2/2, za posao dobivam A=Ž(V0 T+na 2/2). U usporedbi s prethodnim rezultatom, vidim da ista sila proizvodi različit rad u istim vremenskim razdobljima.
Tijelo mase m klizi niz nagnutu ravninu s kutom nagiba α. Koeficijent trenja klizanja tijela o ravninu k... Na tijelo cijelo vrijeme djeluje vodoravna sila. Ž... Koliki je rad ove sile kad se tijelo pomakne za udaljenost S?
Student: – Učinimo poravnanje sila i pronađemo njihovu rezultantu. Vanjska sila F djeluje na tijelo, kao i gravitacija, potpora reakcije i trenje.
Student: – Ispada da je rad A = Ž S jerα i to je to. Zbilja me iznevjerila navika da svaki put tražim sve sile, pogotovo jer problem ukazuje na masu i koeficijent trenja.
Student: – Rad snage Ž Već sam izračunao: A 1 = Ž S jerα. Rad sile teže je A 2 = mgS grijehα. Rad sile trenja ... je negativan, budući da su vektori sile i pomaka suprotno usmjereni: A 3 = - kmgS jerα. Rad sile reakcije N je nula jer su sila i pomak okomiti. Zaista, ne razumijem smisao negativnog rada?
Autor: – To znači da se radom te sile smanjuje kinetička energija tijela. Usput. Razgovarajmo o kretanju tijela prikazanom na slici 2.9.1 sa stajališta zakona očuvanja energije. Prvo, pronađite ukupan rad svih snaga.
Student: - A= A 1 + A 2 + A 3 = FS jerα + mgS grijehα– kmgS jerα.
Prema teoremu o kinetičkoj energiji, razlika između kinetičkih energija u završnom i početnom stanju jednaka je radu na tijelu:
E Za - E n = A.
Student: – Je li moguće da su to bile druge jednadžbe koje nisu bile relevantne za ovaj problem?
Autor: – No sve bi jednadžbe trebale dati isti rezultat. Činjenica je da je potencijalna energija sadržana u latentnom obliku u izrazu za potpuni rad. Uistinu, zapamtite A 2 = mgS grijehα = mgh, gdje je h visina spuštanja tijela. Uzmite sada iz teorema o kinetičkoj energiji izraz za zakon očuvanja energije.
Student: – Budući da je mgh = U n - U k, gdje su U n i U k početna i krajnja potencijalna energija tijela, imamo:
m V. n 2/2 + U n + A 1 + A 3 = m V. do 2/2 + U Do.
Student: – Ovo je, po mom mišljenju, lako. Rad sile trenja po modulu je točno jednak količini topline P... Zato P= kmgS jerα.
Student: m V. n 2/2 + U n + A 1 – P= m V. do 2/2 + U Do.
Autor: – Ajmo sada malo generalizirati definiciju rada. Stvar je u tome da je odnos (2.9.1) istinit samo za slučaj konstantne sile. Iako ima mnogo slučajeva kada sama sila ovisi o kretanju čestice. Navedi primjer.
Student: – Prvo što mi pada na pamet je rastezanje opruge. Kako se nezaštićeni kraj opruge pomiče, sila raste. Drugi primjer odnosi se na njihalo koje je, kako znamo, teže zadržati pri velikim odstupanjima od ravnotežnog položaja.
Autor: – Dobro. Uzmimo primjer s oprugom. Sila elastičnosti idealne opruge opisana je Hookeovim zakonom, prema kojem se opruga, kada se stisne (ili rastegne) za određeni iznos NS postoji sila suprotno usmjerena prema pomaku, linearno ovisna o NS... Napisimo Hookeov zakon u obliku jednakosti:
Ž= - k x (2.9.2)
Ovdje je k koeficijent krutosti opruge, x- količina deformacije opruge. Nacrtajte grafikon ovisnosti Ž(x).
Student: Moj crtež je prikazan na slici.
Slika 2.9.2
Lijeva polovica grafikona odgovara kompresiji opruge, a desna naponu.
Autor: – Izračunajmo sada rad sile F pri kretanju iz NS= 0 do NS= S. Za to postoji opće pravilo. Ako znamo opću ovisnost sile o pomaku, tada je rad u presjeku od x 1 do x 2 površina ispod krivulje F (x) na ovom segmentu.
Student: – To znači da rad elastične sile pri pomicanju tijela iz NS= 0 do NS= S je negativan, a njegov je modul jednak površini pravokutnog trokuta: A= kS 2/2.
A= k NS 2 /2. (2.9.3)
Taj se rad pretvara u potencijalnu energiju deformirane opruge.
Povijest.
Rutherford je publici pokazao raspadanje radija. Zaslon je zasjao i potamnio.
– Sada vidiš – rekao je Rutherford, – da se ništa ne vidi. A zašto ne možete ništa vidjeti, vidjet ćete sada.
Postavite vrijednosti tjelesne težine pomoću klizačam, kut nagiba ravninea, vanjska sila F vanj , koeficijent trenjami ubrzanje a navedene u tablici 1 za vaš tim.
Istovremeno uključite štopericu i pritisnite gumb "Start". Isključite štopericu kad se tijelo zaustavi na kraju nagnute ravnine.
Ponovite ovaj eksperiment 10 puta i zabilježite rezultate mjerenja vremena klizanja tijela s nagnute ravnine u tablicu. 2.
TABLICA 1. Početni parametri pokusa
|
Brig br. |
||||||
|
m, kg |
||||||
|
m |
0,10 |
|||||
|
a, stup |
||||||
|
F int, N. |
||||||
|
a, m / s 2 |
TABELA 2. Rezultati mjerenja i proračuna
|
Rev. br. |
Prosječno značenje |
Pokop |
||||||||||
|
t, s |
||||||||||||
|
v, m / s |
||||||||||||
|
S, m |
||||||||||||
|
W k, J |
||||||||||||
|
W p, J |
||||||||||||
|
A tr, J |
||||||||||||
|
Int, J |
||||||||||||
|
W pun, J |
W p = - potencijalna energija tijela u gornjoj točki nagnute ravnine; |
 - rad vanjske sile na dionici za spuštanje
- rad vanjske sile na dionici za spuštanjePogled: ovaj članak je pročitan 48440 puta
Pdf Odaberite jezik ... Ruski Ukrajinski Engleski
Cijeli materijal preuzima se gore, nakon što ste prethodno odabrali jezik
Dva slučaja transformacije mehaničkog kretanja materijalne točke ili sustava točaka:
- mehaničko kretanje prenosi se iz jednog mehaničkog sustava u drugi kao mehaničko kretanje;
- mehaničko gibanje prelazi u drugi oblik kretanja materije (u oblik potencijalne energije, topline, električne energije itd.).
Kad se razmatra transformacija mehaničkog gibanja bez prijelaza u drugi oblik gibanja, mjera mehaničkog gibanja je vektor impulsa materijalne točke ili mehaničkog sustava. Mjera djelovanja sile u ovom slučaju je vektor impulsa sile.
Kad se mehaničko gibanje pretvori u drugi oblik kretanja tvari, kinetička energija materijalne točke ili mehaničkog sustava djeluje kao mjera mehaničkog kretanja. Mjera djelovanja sile kada se mehaničko kretanje pretvori u drugi oblik kretanja je djelovanje sile
Kinetička energija
Kinetička energija je sposobnost tijela da svlada prepreke tijekom kretanja.
Kinetička energija materijalne točke
Kinetička energija materijalne točke skalarna je veličina koja je jednaka polovici umnoška mase točke na kvadrat njezine brzine.
Kinetička energija:
- karakterizira i translacijske i rotacijske pokrete;
- ne ovisi o smjeru kretanja točaka sustava i ne karakterizira promjenu u tim smjerovima;
- karakterizira djelovanje i unutarnjih i vanjskih sila.
Kinetička energija mehaničkog sustava
Kinetička energija sustava jednaka je zbroju kinetičkih energija tijela sustava. Kinetička energija ovisi o vrsti gibanja tijela sustava.
Određivanje kinetičke energije čvrstog tijela pri različiti tipovi pokreti pokreti.
Kinetička energija translacijskog gibanja
U translacijskom gibanju kinetička energija tijela je T=m V 2/2.
Masa je mjera inercije tijela tijekom translacijskog kretanja.
Kinetička energija rotacijskog kretanja tijela
Tijekom rotacijskog kretanja tijela, kinetička energija jednaka je polovici umnoška momenta inercije tijela u odnosu na os rotacije i kvadrat njegove kutne brzine.
Mjera inercije tijela tijekom rotacijskog kretanja je moment inercije.
Kinetička energija tijela ne ovisi o smjeru rotacije tijela.
Kinetička energija ravninsko-paralelnog gibanja tijela
Ravno-paralelnim gibanjem tijela kinetička energija je
Djelo sile
Rad sile karakterizira djelovanje sile na tijelo pri nekom pomaku i određuje promjenu modula brzine pokretne točke.
Osnovno djelovanje snage
Elementarni rad sile definiran je kao skalarna veličina jednaka umnošku projekcije sile tangentom na putanju, usmjerenom u smjeru kretanja točke, i beskonačno pomakom točke, usmjerenom duž ove tangens.
Prisilni rad na konačnom pomaku
Rad sile na konačni pomak jednak je zbroju njezina rada na elementarnim presjecima.
Rad sile na konačni pomak M 1 M 0 jednak je integralu po ovom pomaku iz elementarnog rada.
Rad sile na pomak M 1 M 2 prikazan je područjem figure omeđenom osi apscise, krivuljom i ordinatama koje odgovaraju točkama M 1 i M 0.
Mjerna jedinica radne snage i kinetičke energije u SI 1 (J).
Teoreme o radu sile
Teorem 1... Rad rezultirajuće sile pri određenom pomaku jednak je algebarskom zbroju rada sastavnih sila pri istom pomaku.
Teorem 2. Rad stalne sile na rezultirajući pomak jednak je algebarskom zbroju rada te sile na pomake komponenata.
Vlast
Snaga je veličina koja određuje rad sile u jedinici vremena.
Mjerna jedinica snage je 1W = 1 J / s.
Slučajevi određivanja rada snaga
Rad unutarnjih snaga
Zbroj rada unutarnjih sila krutog tijela na bilo kojem njegovom pomaku jednak je nuli.
Djelo gravitacije
Rad elastične sile
Rad sile trenja
Rad sila primijenjenih na rotirajuće tijelo
Elementarni rad sila primijenjenih na kruto tijelo koje se okreće oko fiksne osi jednak je umnošku glavnog momenta vanjskih sila u odnosu na os rotacije za prirast u kutu rotacije.
Otpor kotrljanja
U zoni kontakta nepomičnog cilindra i ravnine dolazi do lokalne deformacije kontaktne kompresije, naprezanje se raspoređuje prema eliptičkom zakonu, a linija djelovanja rezultirajućeg N ovih naprezanja podudara se s linijom djelovanja sila opterećenja na cilindar Q. Kad se cilindar prevrne, raspodjela opterećenja postaje asimetrična s maksimumom pomakom prema smjeru kretanja. Rezultirajući N pomaknut je za vrijednost k - krak sile trenja kotrljanja, koji se naziva i koeficijent trenja kotrljanja i ima dimenziju duljine (cm)
Teorem o promjeni kinetičke energije materijalne točke
Promjena kinetičke energije materijalne točke pri nekom njezinom pomaku jednaka je algebarskom zbroju robota svih sila koje djeluju na točku pri istom pomaku.
Teorem o promjeni kinetičke energije mehaničkog sustava
Promjena kinetičke energije mehaničkog sustava pri određenom pomaku jednaka je algebarskom zbroju unutarnjih i vanjskih sila robota koje djeluju na materijalne točke sustava pri istom pomaku.
Teorem o promjeni kinetičke energije krutog tijela
Promjena kinetičke energije krutog tijela (nepromijenjeni sustav) pri određenom pomaku jednaka je zbroju vanjskih sila robota koje djeluju na točke sustava pri istom pomaku.
Učinkovitost
Sile koje djeluju u mehanizmima
Sile i parovi sila (momenti) koji se primjenjuju na mehanizam ili stroj mogu se podijeliti u grupe:
1. Pogonske sile i momenti koji obavljaju pozitivan rad (primjenjuju se na pogonske karike, na primjer, tlak plina na klipu u motoru s unutarnjim izgaranjem).
2. Sile i momenti otpora koji izvode negativan rad:
- korisni otpor (obavite posao potreban od stroja i primjenjuju se na pogonske karike, na primjer, otpor tereta koji stroj podiže),
- sile otpora (na primjer, sile trenja, otpor zraka itd.).
3. Sile gravitacije i sile elastičnosti opruga (i pozitivan i negativan rad, dok je rad za cijeli ciklus jednak nuli).
4. Sile i momenti primijenjeni na tijelo ili stalak izvana (reakcija temelja itd.), Koji ne izvode posao.
5. Sile interakcije između karika, djelujući u kinematičkim parovima.
6. Sile inercije karika, uzrokovane masom i kretanjem karika s ubrzanjem, mogu obavljati pozitivan, negativan rad, a ne raditi.
Rad sila u mehanizmima
U stacionarnom stanju rada stroja njegova se kinetička energija ne mijenja, a zbroj rada pokretačkih sila i sila otpora na njega jednak je nuli.
Rad uložen u pokretanje stroja troši se u prevladavanju korisnih i štetnih otpora.
Učinkovitost mehanizama
Stacionarna mehanička učinkovitost jednaka je omjeru koristan posao stroj na posao uložen u pokretanje stroja:
Strojni elementi mogu biti povezani serijski, paralelno i mješovito.
Učinkovitost u serijskom povezivanju
Kod serijskog povezivanja mehanizama ukupna učinkovitost je manja uz najmanju učinkovitost pojedinog mehanizma.
Učinkovitost s paralelnim spajanjem
Paralelnim povezivanjem mehanizama ukupna učinkovitost veća je od najniže i manja od najveće učinkovitosti pojedinog mehanizma.
Format: pdf
Jezik: ruski, ukrajinski
Primjer izračunavanja zupčanika
Primjer izračunavanja zupčanika. Izvršen je izbor materijala, proračun dopuštenih naprezanja, proračun dodira i čvrstoće na savijanje.
Primjer rješavanja problema savijanja grede
U primjeru se grade dijagrami posmičnih sila i momenata savijanja, pronalazi se opasni presjek i odabire dvosmjerna greda. Zadatak analizira konstrukciju dijagrama pomoću diferencijalnih ovisnosti, provodi se usporedna analiza različitih presjeka grede.
Primjer rješavanja problema torzije vratila
Zadatak je provjeriti čvrstoću čelične osovine za zadani promjer, materijal i dopuštena naprezanja. Tijekom rješenja iscrtavaju se dijagrami zakretnih momenata, posmičnih naprezanja i torzijskih kutova. Mrtva težina vratila se ne uzima u obzir.
Primjer rješavanja problema napetosti-kompresije šipke
Zadatak je provjeriti čvrstoću čelične šipke pri zadanim dopuštenim naprezanjima. Tijekom rješenja iscrtavaju se dijagrami uzdužnih sila, normalnih naprezanja i pomaka. Ne uzima se u obzir vlastita težina šipke.
Primjena teorema o očuvanju kinetičke energije
Primjer rješavanja problema o primjeni teorema o očuvanju kinetičke energije mehaničkog sustava
Energija naziva se skalarna fizikalna veličina koja je jedna mjera različitih oblika gibanja tvari i mjera prijelaza kretanja tvari iz jednog oblika u drugi.
Za karakteriziranje različitih oblika kretanja tvari uvode se odgovarajuće vrste energije, na primjer: mehanička, unutarnja, energija elektrostatičkih, unutarnuklearnih interakcija itd.
Energija poštuje zakon očuvanja, koji je jedan od najvažnijih zakona prirode.
Mehanička energija E karakterizira kretanje i međudjelovanje tijela i funkcija je brzina i međusobnog rasporeda tijela. Jednaka je zbroju kinetičke i potencijalne energije.
Kinetička energija
Razmotrimo slučaj kada tijelo s masom m postoji konstantna sila \ (~ \ vec F \) (može biti rezultanta nekoliko sila), a vektori sile \ (~ \ vec F \) i pomaci \ (~ \ vec s \) usmjereni su duž jedne ravne linija u jednom smjeru. U tom se slučaju rad sile može definirati kao A = Ž∙s... Modul sile prema drugom Newtonovom zakonu je Ž = m ∙ a, i modul pomaka s s jednoliko ubrzanim pravocrtnim gibanjem povezan je s modulima početnog υ 1 i konačno υ 2 brzine i ubrzanja a izraz \ (~ s = \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) \).
Odavde, za posao, dobivamo
\ (~ A = F \ cdot s = m \ cdot a \ cdot \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) = \ frac (m \ cdot \ upsilon ^ 2_2) (2) - \ frac (m \ cdot \ upsilon ^ 2_1) (2) \). (1)
Zove se fizička veličina jednaka polovici umnoška mase tijela na kvadrat njegove brzine kinetička energija tijela.
Kinetička energija označena je slovom E k.
\ (~ E_k = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (2)
Tada se jednakost (1) može zapisati na sljedeći način:
\ (~ A = E_ (k2) - E_ (k1) \). (3)
Teorem o kinetičkoj energiji
rad rezultirajućih sila primijenjenih na tijelo jednak je promjeni kinetičke energije tijela.
Budući da je promjena kinetičke energije jednaka radu sile (3), kinetička energija tijela izražava se u istim jedinicama kao i rad, odnosno u džulima.
Ako je početna brzina kretanja tijela s masom m jednak je nuli i tijelo povećava svoju brzinu na vrijednost υ , tada je rad sile jednak konačnoj vrijednosti kinetičke energije tijela:
\ (~ A = E_ (k2) - E_ (k1) = \ frakcija (m \ cdot \ upsilon ^ 2) (2) - 0 = \ frakcija (m \ cdot \ upsilon ^ 2) (2) \). (4)
Fizičko značenje kinetičke energije
kinetička energija tijela koje se kreće brzinom υ pokazuje koji rad mora izvršiti sila koja djeluje na tijelo u mirovanju kako bi mu prenijela tu brzinu.
Potencijalna energija
Potencijalna energija Je energija interakcije tijela.
Potencijalna energija tijela podignutog iznad Zemlje je energija interakcije između tijela i Zemlje gravitacijskim silama. Potencijalna energija elastično deformiranog tijela je energija interakcije pojedinih dijelova tijela međusobno pomoću elastičnih sila.
Potencijal se zovu snage, čiji rad ovisi samo o početnom i konačnom položaju pokretne materijalne točke ili tijela i ne ovisi o obliku putanje.
Kod zatvorene putanje rad potencijalne sile uvijek je nula. Potencijalne sile uključuju gravitacijske sile, elastične sile, elektrostatičke sile i neke druge.
Snagečiji rad ovisi o obliku putanje nazivaju se nema potencijala... Kad se materijalna točka ili tijelo kreću po zatvorenoj putanji, rad nepotencijalne sile nije nula.
Potencijalna energija interakcije tijela sa Zemljom
Pronađi posao obavljen gravitacijom Ž t pri kretanju tijela mase m okomito prema dolje s visine h 1 iznad površine Zemlje do visine h 2 (slika 1). Ako je razlika h 1 – h 2 je zanemariv u usporedbi s udaljenošću do središta Zemlje, zatim silom gravitacije Ž m za vrijeme kretanja tijela može se smatrati konstantnim i jednakim mg.
Budući da se pomak podudara u smjeru s vektorom gravitacije, gravitacijski rad je
\ (~ A = F \ cdot s = m \ cdot g \ cdot (h_1 - h_2) \). (5)
Razmotrimo sada kretanje tijela po nagnutoj ravnini. Kad se tijelo pomakne niz nagnutu ravninu (slika 2), sila gravitacije Ž t = m ∙ g obavljanje posla
\ (~ A = m \ cdot g \ cdot s \ cdot \ cos \ alpha = m \ cdot g \ cdot h \), (6)
gdje h- visina nagnute ravnine, s- modul pomaka jednak duljini nagnute ravnine.

Kretanje tijela od točke V. točno S duž bilo koje putanje (slika 3) može se mentalno prikazati kao da se sastoji od pomaka duž presjeka nagnutih ravnina s različitim visinama h’, h'' Itd. Rad A gravitacija sve do V. v S jednak je zbroju radova na zasebnim dionicama kolosijeka:
\ (~ A = m \ cdot g \ cdot h " + m \ cdot g \ cdot h" " + \ ldots + m \ cdot g \ cdot h ^ n = m \ cdot g \ cdot (h" + h "" + \ ldots + h ^ n) = m \ cdot g \ cdot (h_1 - h_2) \), (7)
gdje h 1 i h 2 - visine od površine Zemlje na kojima se nalaze točke V. i S.

Jednakost (7) pokazuje da rad sile teže ne ovisi o putanji tijela i uvijek je jednak umnošku modula sile teže na razliku visina u početnom i krajnjem položaju.
Prilikom kretanja prema dolje, gravitacijski rad je pozitivan, a pri kretanju prema gore negativan. Gravitacija na zatvorenom putu jednaka je nuli.
Jednakost (7) možemo predstaviti na sljedeći način:
\ (~ A = - (m \ cdot g \ cdot h_2 - m \ cdot g \ cdot h_1) \). (osam)
Fizička veličina jednaka umnošku mase tijela po modulu ubrzanja gravitacije i po visini na koju se tijelo podiže iznad površine Zemlje naziva se potencijalna energija interakcija tijela i Zemlje.
Gravitacijski rad pri kretanju tijela mase m od točke koja se nalazi na visini h 2, do točke koja se nalazi na visini h 1 s površine Zemlje, uz bilo koju putanju jednaka je promjeni potencijalne energije interakcije između tijela i Zemlje, uzeta sa suprotnim predznakom.
\ (~ A = - (E_ (p2) - E_ (p1)) \). (devet)
Potencijalna energija označena je slovom E str.
Vrijednost potencijalne energije tijela podignutog iznad Zemlje ovisi o izboru nulte razine, odnosno visine na kojoj se potencijalna energija uzima za nulu. Obično se pretpostavlja da je potencijalna energija tijela na površini Zemlje jednaka nuli.
Ovim izborom nulte razine, potencijalna energija E p tijela na visini h iznad površine Zemlje, jednak je umnošku mase m tijela po modulu gravitacijskog ubrzanja g i udaljenost h sa površine Zemlje:
\ (~ E_p = m \ cdot g \ cdot h \). (deset)
Fizičko značenje potencijalne energije interakcije tijela sa Zemljom
potencijalna energija tijela, na koju djeluje sila gravitacije, jednaka je radu sile gravitacije kada se tijelo pomakne na nultu razinu.
Za razliku od kinetičke energije translacijskog kretanja, koja može imati samo pozitivne vrijednosti, potencijalna energija tijela može biti i pozitivna i negativna. Tjelesna masa m na nadmorskoj visini h, gdje h < h 0 (h 0 - nulta visina), ima negativnu potencijalnu energiju:
\ (~ E_p = -m \ cdot g \ cdot h \).
Potencijalna energija gravitacijske interakcije
Potencijalna energija gravitacijske interakcije sustava dviju materijalnih točaka s masama m i M na udaljenosti r jedno od drugog, jednako je
\ (~ E_p = G \ cdot \ frac (M \ cdot m) (r) \). (jedanaest)
gdje G Je li gravitacijska konstanta i nula potencijalne energije ( E p = 0) usvaja se pri r = ∞.
Potencijalna energija gravitacijske interakcije tijela s masom m sa Zemljom gdje h- tjelesna visina iznad Zemljine površine, M e je masa Zemlje, R e je polumjer Zemlje, a nula potencijalne energije je odabrana na h = 0.
\ (~ E_e = G \ cdot \ frac (M_e \ cdot m \ cdot h) (R_e \ cdot (R_e + h)) \). (12)
Pod istim uvjetom za odabir nulte reference, potencijalna energija gravitacijske interakcije tijela s masom m sa Zemljom za male visine h (h « R e) jednako
\ (~ E_p = m \ cdot g \ cdot h \),
gdje je \ (~ g = G \ cdot \ frac (M_e) (R ^ 2_e) \) modul gravitacijskog ubrzanja u blizini Zemljine površine.
Potencijalna energija elastično deformiranog tijela
Izračunajmo djelovanje elastične sile pri promjeni deformacije (produljenja) opruge od neke početne vrijednosti x 1 do konačne vrijednosti x 2 (sl. 4, b, c).

Sila elastičnosti se mijenja kako se opruga deformira. Da biste pronašli rad elastične sile, možete uzeti prosječnu vrijednost modula sile (budući da elastična sila linearno ovisi o x) i pomnožiti s modulom pomaka:
\ (~ A = F_ (upr -cp) \ cdot (x_1 - x_2) \), (13)
gdje je \ (~ F_ (upr -cp) = k \ cdot \ frac (x_1 - x_2) (2) \). Odavde
\ (~ A = k \ cdot \ frac (x_1 - x_2) (2) \ cdot (x_1 - x_2) = k \ cdot \ frac (x ^ 2_1 - x ^ 2_2) (2) \) ili \ (~ A = - \ lijevo (\ frac (k \ cdot x ^ 2_2) (2) - \ frac (k \ cdot x ^ 2_1) (2) \ right) \). (četrnaest)
Fizička veličina jednaka polovici umnožaka krutosti tijela na kvadrat njegove deformacije naziva se potencijalna energija elastično deformirano tijelo:
\ (~ E_p = \ frac (k \ cdot x ^ 2) (2) \). (15)
Iz formula (14) i (15) proizlazi da je rad elastične sile jednak promjeni potencijalne energije elastično deformiranog tijela, uzetom sa suprotnim predznakom:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (16)
Ako x 2 = 0 i x 1 = NS, tada, kao što se može vidjeti iz formula (14) i (15),
\ (~ E_p = A \).
Fizičko značenje potencijalne energije deformiranog tijela
potencijalna energija elastično deformiranog tijela jednaka je radu koji elastična sila izvodi pri prijelazu tijela u stanje u kojem je deformacija nula.
Potencijalna energija karakterizira tijela u interakciji, a kinetička energija karakterizira gibljiva tijela. I potencijalna i kinetička energija mijenjaju se samo kao rezultat takve interakcije tijela u kojoj sile koje djeluju na tijela obavljaju rad koji nije nula. Razmotrimo pitanje promjena energije tijekom interakcija tijela koja tvore zatvoreni sustav.
Zatvoreni sustav Je li sustav na koji ne utječu vanjske sile ili je djelovanje tih sila kompenzirano... Ako više tijela međusobno djeluju samo s gravitacijskim i elastičnim silama, a na njih ne djeluju vanjske sile, tada je za bilo koju interakciju tijela rad elastičnih sila ili gravitacijskih sila jednak promjeni potencijalne energije tijela, uzeto sa suprotnim znakom:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (17)
Prema teoremu o kinetičkoj energiji, rad istih sila jednak je promjeni kinetičke energije:
\ (~ A = E_ (k2) - E_ (k1) \). (osamnaest)
Iz usporedbe jednakosti (17) i (18) može se vidjeti da je promjena kinetičke energije tijela u zatvorenom sustavu jednaka po apsolutnoj vrijednosti promjeni potencijalne energije sustava tijela i suprotna je do njega u znaku:
\ (~ E_ (k2) - E_ (k1) = - (E_ (p2) - E_ (p1)) \) ili \ (~ E_ (k1) + E_ (p1) = E_ (k2) + E_ (p2) \). (19)
Zakon očuvanja energije u mehaničkim procesima:
zbroj kinetičke i potencijalne energije tijela koja čine zatvoren sustav i međusobno djeluju silama gravitacije i silama elastičnosti, ostaje konstantna.
Zbroj kinetičke i potencijalne energije tijela naziva se punu mehaničku energiju.
Dajmo najjednostavnije iskustvo... Bacimo čeličnu kuglu. Nakon što je početna brzina υ započela, dat ćemo joj kinetičku energiju, zbog čega će se ona početi dizati prema gore. Djelovanje gravitacije dovodi do smanjenja brzine lopte, a time i njene kinetičke energije. No, lopta se diže sve više i više i stječe sve više potencijalne energije ( E p = m ∙ g ∙ h). Dakle, kinetička energija ne nestaje bez traga, već se pretvara u potencijalnu energiju.
U trenutku dostizanja najviše točke putanje ( υ = 0) lopta je potpuno lišena kinetičke energije ( E k = 0), ali u isto vrijeme njegova potencijalna energija postaje maksimalna. Tada lopta mijenja smjer kretanja i kreće se prema dolje sve većom brzinom. Sada se događa obrnuta transformacija potencijalne energije u kinetičku.
Zakon očuvanja energije otkriva fizičko značenje pojmovi raditi:
rad gravitacijskih sila i elastičnih sila, s jedne strane, jednak je povećanju kinetičke energije, a s druge strane smanjenju potencijalne energije tijela. Posljedično, rad je jednak energiji koja se promijenila iz jedne vrste u drugu.
Zakon o promjeni mehaničke energije
Ako sustav međudjelujućih tijela nije zatvoren, tada se njegova mehanička energija ne čuva. Promjena mehaničke energije takvog sustava jednaka je radu vanjskih sila:
\ (~ A_ (vn) = \ Delta E = E - E_0 \). (dvadeset)
gdje E i E 0 - ukupne mehaničke energije sustava u završnom i početnom stanju.
Primjer takvog sustava je sustav u kojem bespotencijalne sile djeluju zajedno s potencijalnim silama. Nepotencijalne sile uključuju sile trenja. U većini slučajeva, kada kut između sile trenja Ž r tijelo je π radijan, rad sile trenja je negativan i jednak
\ (~ A_ (tr) = -F_ (tr) \ cdot s_ (12) \),
gdje s 12 - put tijela između točaka 1 i 2.
Sile trenja tijekom kretanja sustava smanjuju njegovu kinetičku energiju. Zbog toga se mehanička energija zatvorenog nekonzervativnog sustava uvijek smanjuje, pretvarajući se u energiju nemehaničkih oblika kretanja.
Na primjer, automobil koji se kreće uz vodoravni dio ceste, nakon što ugasi motor, prijeđe određenu udaljenost i zaustavi se pod utjecajem sila trenja. Kinetička energija translacijskog kretanja vozila postala je nula, a potencijalna se energija nije povećala. Tijekom kočenja vozila došlo je do zagrijavanja kočnih pločica, guma vozila i asfalta. Posljedično, kao posljedica djelovanja sila trenja, kinetička energija automobila nije nestala, već se pretvorila u unutarnju energiju toplinskog gibanja molekula.
Zakon očuvanja i transformacije energije
u bilo kojoj fizičkoj interakciji energija se pretvara iz jednog oblika u drugi.
Ponekad kut između sile trenja Ž tr i elementarni pomak Δ r je nula i rad sile trenja je pozitivan:
\ (~ A_ (tr) = F_ (tr) \ cdot s_ (12) \),
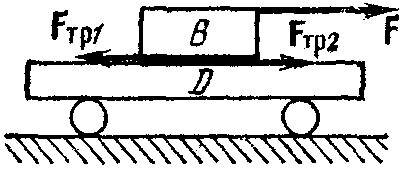
Primjer 1... Neka, vanjska sila Ž djeluje na traci V. koji može kliziti po kolicima D(slika 5). Ako se kolica pomaknu udesno, tada djeluje sila trenja klizanja Ž tr2 koji djeluje na kolica sa strane šipke je pozitivan:
Primjer 2... Kad se kotač kotrlja, njegova sila trenja kotrljanja usmjerena je uz kretanje, budući da se dodirna točka kotača s vodoravnom površinom pomiče u smjeru suprotnom od smjera kretanja kotača, a rad sile trenja je pozitivan (Slika 6):

Književnost
- O.F. Kabardin Fizika: Ref. materijali: Udžbenik. priručnik za studente. - M.: Obrazovanje, 1991.- 367 str.
- Kikoin I.K., Kikoin A.K. Fizika: Udžbenik. za 9 cl. srijeda shk - M.: Pro-sveshenie, 1992.- 191 str.
- Osnovni udžbenik fizike: Udžbenik. džeparac. U 3 sveska / Ur. G.S. Landsberg: svezak 1. Mehanika. Toplina. Molekularna fizika. - M.: Fizmatlit, 2004.- 608 str.
- Yavorskiy B.M., Seleznev Yu.A. Referentni vodič za fiziku za sveučilišne kandidate i samoobrazovanje. - M.: Nauka, 1983.- 383 str.
Također preporučujemo
 Kako osvojiti njegovo srce: učinkoviti načini Kako duboko utonuti u čovjekovo srce
Kako osvojiti njegovo srce: učinkoviti načini Kako duboko utonuti u čovjekovo srce
 Aforizmi o obrazovanju, poslovice i citati o učenju
Aforizmi o obrazovanju, poslovice i citati o učenju
 Kako psovati sa svojim mužem: tabu u svađama koje se ne mogu prekršiti Psovanje u obitelji što učiniti
Kako psovati sa svojim mužem: tabu u svađama koje se ne mogu prekršiti Psovanje u obitelji što učiniti
 Kako napraviti pune usne kod kuće?
Kako napraviti pune usne kod kuće?
 Otvorena lekcija "Nema takvog prijatelja kao što je moja vlastita majka" Kako je ispravno ime za bilješku: o počivanju takvog i takvog ili o počivanju duše takvog i takvog?
Otvorena lekcija "Nema takvog prijatelja kao što je moja vlastita majka" Kako je ispravno ime za bilješku: o počivanju takvog i takvog ili o počivanju duše takvog i takvog?
 Bolje je oprati plastični prozor kod kuće
Bolje je oprati plastični prozor kod kuće