운동 에너지에 대한 일력 정리. 참조
스칼라 값 T, 합계와 동일시스템의 모든 지점의 운동 에너지를 시스템의 운동 에너지라고 합니다.
운동 에너지는 시스템의 병진 및 회전 운동의 특성입니다. 그 변화는 외력의 작용에 의해 영향을 받으며, 스칼라이므로 계의 각 부분의 운동 방향에 의존하지 않는다.
다양한 운동 사례에 대한 운동 에너지를 구해 봅시다.
1.병진운동
시스템의 모든 점의 속도는 질량 중심의 속도와 같습니다. 그 다음에
병진 운동에서 시스템의 운동 에너지는 질량 중심 속도의 제곱에 의한 시스템 질량 곱의 절반과 같습니다.
2. 회전 운동(그림 77)
신체의 모든 지점의 속도:. 그 다음에
![]()
또는 공식 (15.3.1)을 사용하여:
![]()
회전하는 동안 몸체의 운동 에너지는 각속도의 제곱에 의한 회전축에 대한 몸체의 관성 모멘트 곱의 절반과 같습니다.
3. 평면 평행 이동
주어진 운동에서 운동 에너지는 병진 운동과 회전 운동의 에너지의 합입니다.
운동의 일반적인 경우는 계산 공식을 제공합니다 운동 에너지후자와 비슷합니다.
우리는 14장의 3항에서 일과 힘의 정의를 만들었습니다. 여기서 우리는 기계 시스템에 작용하는 힘의 일과 힘을 계산하는 예를 고려할 것입니다.
1.중력의 작용... 하자, 본체의 점 k의 초기 및 최종 위치의 좌표. 이 무게 입자에 작용하는 중력의 일은 ![]() ... 그런 다음 전체 작업은 다음과 같습니다.
... 그런 다음 전체 작업은 다음과 같습니다.
여기서 P는 재료 점 시스템의 무게이며 무게 중심 C의 수직 변위입니다.
2. 회전체에 작용하는 힘의 작용.
관계식 (14.3.1)에 따라 쓸 수 있지만 그림 74에 따른 ds는 무한히 작기 때문에 다음과 같은 형식으로 나타낼 수 있습니다. ![]() - 신체의 극소 회전 각도. 그 다음에
- 신체의 극소 회전 각도. 그 다음에
수량 ![]() 토크라고 합니다.
토크라고 합니다.
공식 (19.1.6)은 다음과 같이 다시 쓸 수 있습니다.
기본 일은 토크와 기본 회전의 곱과 같습니다.
최종 각도로 전환할 때 다음을 수행합니다.

토크가 일정하면
그리고 힘은 관계에서 결정됩니다 (14.3.5)
토크와 몸체의 각속도의 곱으로.
한 점(§ 14.4)에 대해 증명된 운동 에너지의 변화에 대한 정리는 시스템의 모든 점에 대해 유효합니다.

시스템의 모든 점에 대해 이러한 방정식을 작성하고 항별로 추가하면 다음을 얻습니다.

또는 (19.1.1)에 따라:
이것은 미분 형태의 시스템의 운동 에너지에 대한 정리의 표현입니다.
(19.2.2)를 통합하여 다음을 얻습니다.
최종 형태의 운동 에너지 변화에 대한 정리: 일부 최종 변위가 있는 시스템의 운동 에너지 변화는 시스템에 적용된 모든 외부 및 내부 힘의 이 변위에 대한 작업의 합과 같습니다. .
내부 세력이 배제되지 않는다는 점을 강조합시다. 불변계에서 모든 내부 힘의 일의 합은 0이고
시스템에 부과된 구속조건이 시간이 지남에 따라 변경되지 않으면 외부 및 내부 힘 모두 활성 및 구속 반작용으로 나눌 수 있으며 이제 방정식(19.2.2)을 작성할 수 있습니다.
역학에서는 "이상적인" 기계 시스템과 같은 개념이 도입됩니다. 이것은 운동 에너지의 변화에 영향을 미치지 않는 결합의 존재, 즉
시간에 따라 변하지 않고 기본 변위에 대한 작업의 합이 0과 같은 이러한 연결을 이상적이라고하며 방정식 (19.2.5)은 다음과 같이 작성됩니다.
주어진 위치 M에 있는 물질 점의 위치 에너지는 스칼라 양 P라고 하며, 점이 M 위치에서 0으로 이동할 때 필드 힘이 생성하는 일과 같습니다.
P = A(월) (19.3.1)
위치 에너지는 점 M의 위치, 즉 좌표에 따라 다릅니다.
P = P(x, y, z) (19.3.2)
힘장은 크기와 방향으로 결정된 힘이 입자에 작용하고 입자의 위치, 즉 좌표 x에 따라 달라지는 각 지점에서 공간 체적의 일부라고 설명하겠습니다. , y, z. 예를 들어 지구의 중력장.
미분이 일과 같은 좌표의 함수 U를 호출합니다. 전원 기능... 힘 함수가 존재하는 힘 필드는 잠재적인 역장, 그리고 이 분야에서 작용하는 힘은 잠재적인 힘.
두 강도 함수(x, y, z)와 U(x, y, z)의 영점이 일치하도록 합니다.
공식 (14.3.5)에 의해 우리는 다음을 얻습니다. dA = dU(x, y, z) 및

여기서 U는 점 M의 힘 함수의 값입니다. 따라서
П(x, y, z) = -U(x, y, z) (19.3.5)
힘장의 임의 지점에서의 위치 에너지는 반대 부호로 취한 이 지점에서의 힘 함수의 값과 같습니다.
즉, 힘장의 속성을 고려할 때 힘 함수 대신 위치 에너지를 고려할 수 있으며 특히 식 (19.3.3)은 다음과 같이 다시 작성됩니다.
잠재적 인 힘의 일은 초기 및 최종 위치에서 움직이는 점의 위치 에너지 값의 차이와 같습니다.
특히 중력의 작용:
시스템에 작용하는 모든 힘을 전위로 둡니다. 그런 다음 시스템의 각 점 k에 대해 작업은 다음과 같습니다.
그러면 외부와 내부의 모든 힘에 대해
전체 시스템의 잠재적 에너지는 어디에 있습니까?
우리는 이 합을 운동 에너지(19.2.3)에 대한 표현으로 대체합니다.
또는 마지막으로:
잠재적 인 힘의 작용으로 움직일 때 각 위치에서 시스템의 운동 에너지와 위치 에너지의 합은 일정하게 유지됩니다. 이것은 역학적 에너지 보존 법칙입니다.
1kg의 하중이 x = 0.1sinl0t 법칙에 따라 자유 진동을 수행합니다. 스프링 강성 계수 c = 100 N / m. x = 0에서 위치 에너지가 0인 경우 x = 0.05m에서 부하의 총 기계적 에너지를 결정합니다.  . (0,5)
. (0,5)
m = 4kg의 질량을 가진 하중이 아래로 떨어지고 나사를 사용하여 반지름 R = 0.4m인 실린더를 회전시킵니다 회전축에 대한 실린더의 관성 모멘트 I = 0.2. 하중의 속도 v = 2m / s일 때 물체 시스템의 운동 에너지를 결정하십시오.  . (10,5)
. (10,5)
정의부터 시작하겠습니다. 일하다 NS힘 NS 움직일 때 NS 적용되는 몸체는 벡터의 내적으로 정의됩니다. NS 그리고 NS .
A =F x = 에프엑스코스α.(2.9.1)
어디에 α - 힘과 운동 방향 사이의 각도.
이제 우리는 균일하게 가속된 운동으로 얻어지는 식 (1.6a)가 필요합니다. 그러나 우리는 운동 에너지 정리라고 불리는 보편적인 결론을 도출할 것입니다. 그래서 우리는 평등(1.6 a)을 다시 씁니다.
엑스=(V 2 –V 0 2)/2.
우리는 평등의 양쪽에 입자의 질량을 곱하면 다음을 얻습니다.
FX= m(V 2 -V 0 2) / 2.
마침내
에이 = m V 2/2 - 미디엄 V 0 2/2. (2.9.1)
수량 이자형=미디엄 V 2/2는 입자의 운동 에너지라고합니다.
기하학 정리에는 고유한 구두 공식이 있다는 사실에 익숙합니다. 이 전통을 따라잡기 위해 우리는 운동 에너지 정리를 텍스트 형태로 제시합니다.
신체의 운동 에너지의 변화는 신체에 작용하는 모든 힘의 일과 같습니다.
이 정리는 본질적으로 보편적입니다. 즉, 모든 유형의 운동에 유효합니다. 그러나 정확한 증명은 적분 미적분의 사용과 관련이 있습니다. 따라서 생략합니다.
중력장에서의 신체 움직임의 예를 고려하십시오. 중력의 작용은 시작점과 끝점을 연결하는 궤적의 유형에 의존하지 않고 시작점과 끝점의 높이 차이에 의해서만 결정됩니다.
A = mg( 시간 1 –시간 2). (2.9.2)
중력장의 어떤 점을 원점으로 하여 입자가 다른 임의의 점에서 이 점으로 이동할 때 중력이 한 일을 고려할 것입니다. NS높이에 위치 시간... 이 작업은 다음과 같습니다. mgh위치 에너지라고 하며 이자형점에서 n개의 입자 NS:
이자형 n = mgh(2.9.3)
이제 평등을 변환합니다(2.9.1). 운동 에너지에 대한 역학적 정리는 다음 형식을 취합니다.
에이 = m V 2/2 - 미디엄 V 0 2/2 = 이자형 n1 - 이자형 n2. (2.9.4)
미디엄 V 2/2 + 이자형 n2 = 미디엄 V 0 2/2 + 이자형 n1.
이 평등에서 왼쪽에는 궤적의 끝점에서 운동 에너지와 위치 에너지의 합이 있고 오른쪽에는 초기 지점에서 있습니다.
이 양을 총 기계적 에너지라고 합니다. 우리는 그것을 표시 할 것입니다 이자형.
이자형=이자형+로 이자형 NS.
우리는 총 에너지 보존 법칙에 도달했습니다. 닫힌 시스템에서 총 에너지는 보존됩니다.
그러나 한 가지 점을 지적해야 합니다. 우리가 소위 말하는 예를 고려하는 동안 보수세력... 이러한 힘은 공간에서의 위치에만 의존합니다. 그리고 신체를 한 위치에서 다른 위치로 이동할 때 이러한 힘에 의해 수행되는 일은 이 두 위치에만 의존하며 경로에 의존하지 않습니다. 보존력이 한 일은 기계적으로 되돌릴 수 있습니다. 즉, 신체가 원래 위치로 돌아갈 때 부호가 바뀝니다. 중력은 보수적인 힘입니다. 앞으로 우리는 정전기 상호 작용의 힘과 같은 다른 유형의 보존력에 대해 알게 될 것입니다.
그러나 자연에는 비보수 세력... 예를 들어, 슬라이딩 마찰력. 입자의 경로가 클수록 이 입자에 작용하는 슬라이딩 마찰력에 의해 더 많은 작업이 수행됩니다. 또한 슬라이딩 마찰력의 작용은 항상 음수입니다. 즉, 그러한 힘은 에너지를 "반환"할 수 없습니다.
닫힌 시스템의 경우 총 에너지는 물론 보존됩니다. 그러나 대부분의 기계적 작업의 경우 더 중요합니다. 특별한 상황에너지 보존 법칙, 즉 전체 역학적 에너지 보존 법칙. 여기 그 문구가 있습니다.
보존력만 물체에 작용하면 운동 에너지와 위치 에너지의 합으로 정의되는 총 역학적 에너지는 보존됩니다..
다음에서 우리는 두 가지 더 중요한 평등이 필요합니다. 언제나처럼, 우리는 중력장의 특정한 경우에 대한 간단한 시연으로 결론을 대체할 것입니다. 그러나 이러한 평등의 형태는 어떤 보수 세력에게도 유효합니다.
우리는 형식에 평등(2.9.4)을 가져옵니다.
에이 = 에프∆x = 전자 n1 - 이자형 n2 = - ( 이자형엔콘 - 이자형 a.p.) = - ∆U.
여기에서 우리는 일을 보았습니다. NS물체가 거리 ∆를 이동할 때 NS.최종 위치 에너지와 초기 위치 에너지의 차이와 같은 값 ∆U를 위치 에너지의 변화라고 합니다. 그리고 결과 평등은 별도의 줄과 특수 번호가 필요합니다. 서둘러 그에게 할당합시다.
A =- ∆U (2.9.5)
여기에서 힘과 위치 에너지 사이의 수학적 연결은 다음과 같습니다.
NS= - ∆U / ∆ NS(2.9.6)
중력장과 관련이 없는 일반적인 경우 등식(2.9.6)이 가장 간단한 미분 방정식입니다.
F = - dU / dx.
증거가 없는 마지막 예를 살펴보겠습니다. 중력은 중력의 법칙으로 설명됩니다 F(r) = GmM / r 2그리고 보수적이다. 중력장의 위치 에너지에 대한 표현은 다음과 같습니다.
유(r) = –GmM/r.
작가: – 간단한 경우를 살펴보자. 수평면에 위치한 질량 m인 물체는 일정 시간 동안 질량 m인 물체에 작용합니다. NS수평력 NS... 마찰이 없습니다. 힘의 일은 무엇입니까 NS?
학생: – 동안 NS몸은 거리 S로 이동할 것입니다 = 에 2/2, 여기서 NS=NS/ 미디엄. 따라서 구하는 작업은 NS=NS에스 = NS 2 NS 2 / (2m).
작가: 힘이 작용하기 시작하기 전에 몸이 정지했다고 가정하면 모든 것이 옳습니다. 작업을 조금 복잡하게 합시다. 힘이 작용하기 시작하기 전에 외부 힘과 같은 방향으로 일정한 속도 V 0 로 몸을 직선으로 균일하게 움직이게 하십시오. 지금 시간당 작업량은 얼마입니까 NS?
학생: – 변위를 계산하기 위해 더 일반적인 공식을 사용하겠습니다. S = V 0 NS+에 2/2, 나는 일을 위해 얻는다 NS=NS(V 0 NS+에 2/2). 이전 결과와 비교하면 같은 힘이 같은 시간 동안 다른 일을 하는 것을 알 수 있습니다.
질량 m인 물체가 경사각 α를 갖는 경사면을 미끄러져 내려갑니다. 평면에 대한 몸체의 미끄럼 마찰 계수 케이... 수평력은 항상 몸에 작용합니다. NS... 물체가 거리 S를 이동할 때 이 힘의 일은 무엇입니까?
학생: – 힘을 정렬하고 그 결과를 구합시다. 외력 F는 중력뿐만 아니라 신체에 작용하여 반작용과 마찰을 지원합니다.
학생: – 작업 A = NS NS 코사인α 그리고 그게 다야. 특히 문제가 질량과 마찰 계수를 나타내기 때문에 매번 모든 힘을 찾는 습관에 정말 실망했습니다.
학생: – 힘의 일 NS나는 이미 계산했습니다: A 1 = NS NS 코사인α. 중력의 일은 A 2 = mgS 죄α. 힘과 변위의 벡터가 반대 방향으로 향하기 때문에 마찰력 ...의 일은 음수입니다. А 3 = - kmgS 코사인α. 반력의 작용 N힘과 변위가 수직이기 때문에 0입니다. 정말, 나는 부정적인 작업의 의미를 잘 이해하지 못합니까?
작가: – 이것은 이 힘의 작용이 신체의 운동 에너지를 감소시킨다는 것을 의미합니다. 그런데. 에너지 보존 법칙의 관점에서 그림 2.9.1과 같은 몸체의 운동을 논의합시다. 먼저 모든 힘의 총 일을 찾으십시오.
학생: - NS= NS 1 + NS 2 + NS 3 = FS 코사인α + mgS 죄α-kmgS 코사인α.
운동 에너지 정리에 따르면 최종 상태와 초기 상태의 운동 에너지 차이는 신체에 한 일과 같습니다.
이자형 NS - 이자형 n = NS.
학생: – 아마도 이것들은 이 문제와 관련이 없는 다른 방정식이었습니까?
작가: – 그러나 모든 방정식은 동일한 결과를 제공해야 합니다. 요점은 전체 일에 대한 표현에서 잠재적인 에너지가 잠재된 형태로 포함되어 있다는 것입니다. 실제로 A 2 = mgS를 기억하십시오. 죄α = mgh, 여기서 h는 신체의 하강 높이입니다. 이제 운동 에너지 정리에서 에너지 보존 법칙의 표현을 얻으십시오.
학생: – mgh = U n - U k, 여기서 U n 및 U k는 각각 신체의 초기 및 최종 잠재적 에너지이므로 다음을 갖습니다.
미디엄 V n 2/2 + 유엔 + NS 1 + NS 3 = m V~ 2/2 + 유 NS.
학생: – 제 생각에는 이것은 쉽습니다. 계수로 표시된 마찰력의 일은 열의 양과 정확히 같습니다. NS... 그렇기 때문에 NS= kmgS 코사인α.
학생: 미디엄 V n 2/2 + 유엔 + NS 1 – NS= m V~ 2/2 + 유 NS.
작가: – 이제 일의 정의를 조금 일반화해 봅시다. 요점은 관계식(2.9.1)이 일정한 힘의 경우에만 참이라는 것입니다. 힘 자체가 입자의 움직임에 의존하는 경우가 많지만. 예를 들어.
학생: – 가장 먼저 떠오르는 것은 봄의 스트레칭입니다. 스프링의 고정되지 않은 끝이 움직이면 힘이 증가합니다. 두 번째 예는 우리가 알다시피 평형 위치에서 큰 편차를 유지하기가 더 어려운 진자와 연결되어 있습니다.
작가: – 좋은. 스프링을 예로 들어 보겠습니다. 이상적인 스프링의 탄성력은 Hooke의 법칙에 의해 설명되며, 이에 따르면 스프링이 일정량만큼 압축(또는 늘어남)될 때 NS에 선형적으로 의존하는 변위와 반대 방향의 힘이 있습니다. NS... Hooke의 법칙을 평등의 형태로 작성해 보겠습니다.
NS= - k NS (2.9.2)
여기서 k는 스프링 강성 계수, NS- 스프링 변형량. 의존성 그래프 그리기 NS(NS).
학생: 내 그림이 그림에 표시됩니다.
그림 2.9.2
그래프의 왼쪽 절반은 스프링 압축에 해당하고 오른쪽 절반은 인장에 해당합니다.
작가: – 이제 에서 이동할 때 힘 F의 일을 계산해 봅시다. NS= 0 ~ NS= S. 이에 대한 일반적인 규칙이 있습니다. 변위에 대한 힘의 일반적인 의존성을 알고 있다면 x 1에서 x 2까지의 섹션에서 작업은 이 세그먼트의 곡선 F(x) 아래 영역입니다.
학생: – 이것은 물체가 에서 움직일 때 탄성력의 작용을 의미합니다. NS= 0 ~ NS= S는 음수이고 계수는 직각 삼각형의 면적과 같습니다. NS= kS 2/2.
NS= k NS 2 /2. (2.9.3)
이 일은 변형된 스프링의 위치 에너지로 변환됩니다.
역사.
Rutherford는 청중에게 라듐의 붕괴를 보여주었습니다. 화면이 밝아지고 어두워졌습니다.
– 이제 당신은 볼 – 러더퍼드가 말했다. – 아무것도 보이지 않는다는 것. 그리고 왜 아무것도 볼 수 없는지 이제 알게 될 것입니다.
슬라이더를 사용하여 체중 값 설정미디엄, 평면의 경사각NS, 외력 F 내선 , 마찰 계수미디엄가속 NS귀하의 팀에 대해 표 1에 나열되어 있습니다.
동시에 스톱워치를 켜고 "시작" 버튼을 누릅니다. 몸이 경사면의 끝에서 멈출 때 스톱워치를 끕니다.
이 실험을 10회 반복하고 몸이 경사면에서 미끄러지는 시간을 측정한 결과를 표에 기록한다. 2.
표 1. 실험의 초기 매개변수
|
브리그 번호 |
||||||
|
m, kg |
||||||
|
미디엄 |
0,10 |
|||||
|
에이, 도 |
||||||
|
F 정수, N |
||||||
|
에이, m/s 2 |
표 2. 측정 및 계산 결과
|
목사 번호 |
평균 의미 |
매장 |
||||||||||
|
t, s |
||||||||||||
|
v, m/s |
||||||||||||
|
에스, 엠 |
||||||||||||
|
W k, J |
||||||||||||
|
승, 제 |
||||||||||||
|
A tr, J |
||||||||||||
|
A 정수, J |
||||||||||||
|
W 풀, J |
W p = - 경사면의 위쪽 지점에서 신체의 위치 에너지; |
 - 하강구간에서 외력의 작용
- 하강구간에서 외력의 작용보다:이 기사는 48440번 읽혔습니다
PDF 언어 선택 ... 러시아어 우크라이나어 영어
이전에 언어를 선택한 상태에서 전체 자료가 위에서 다운로드됩니다.
재료 점 또는 점 시스템의 기계적 운동 변환의 두 가지 경우:
- 기계적 움직임은 기계적 움직임으로 한 기계 시스템에서 다른 기계 시스템으로 전달됩니다.
- 기계적 운동은 다른 형태의 물질 운동으로 바뀝니다(위치 에너지, 열, 전기 등의 형태로).
기계적 운동의 변환이 다른 형태의 운동으로의 전환 없이 고려될 때 기계적 운동의 척도는 재료 점 또는 기계 시스템의 운동량 벡터입니다. 이 경우 힘의 작용의 척도는 힘의 임펄스의 벡터입니다.
기계적 운동이 다른 형태의 물질 운동으로 변할 때, 물질 점 또는 기계적 시스템의 운동 에너지는 기계적 운동의 척도로 작용합니다. 기계적 운동이 다른 형태의 운동으로 변형될 때의 힘의 작용의 척도는 일
운동 에너지
운동 에너지는 움직이는 동안 장애물을 극복하는 신체의 능력입니다.
물질 점의 운동 에너지
물질 점의 운동 에너지는 점의 질량을 속도의 제곱으로 곱한 값의 절반과 같은 스칼라 양입니다.
운동 에너지:
- 병진운동과 회전운동을 특징짓는다.
- 시스템 포인트의 이동 방향에 의존하지 않으며 이러한 방향의 변화를 특성화하지 않습니다.
- 내부 및 외부 힘의 작용을 특성화합니다.
기계 시스템의 운동 에너지
시스템의 운동 에너지는 시스템 몸체의 운동 에너지의 합과 같습니다. 운동 에너지는 시스템 몸체의 운동 유형에 따라 다릅니다.
에서 고체의 운동 에너지 결정 다른 유형움직임 움직임.
병진 운동의 운동 에너지
병진 운동에서 신체의 운동 에너지는 NS=미디엄 V 2/2.
질량은 병진 운동 중 신체 관성의 척도입니다.
몸의 회전 운동의 운동 에너지
몸체의 회전 운동 동안 운동 에너지는 회전축에 대한 몸체의 관성 모멘트와 각속도의 제곱의 곱의 절반과 같습니다.
회전 운동 중 몸체의 관성 측정은 관성 모멘트입니다.
물체의 운동 에너지는 물체의 회전 방향에 의존하지 않습니다.
평면 평행 몸체 운동의 운동 에너지
신체의 평면 평행 운동으로 운동 에너지는 다음과 같습니다.
힘의 일
힘의 작용은 일부 변위에서 몸체에 대한 힘의 작용을 특성화하고 이동 점의 속도 계수의 변화를 결정합니다.
힘의 기초 작업
힘의 기본 일은 점의 이동 방향으로 향하는 궤적에 대한 접선에 의한 힘의 투영과 이 방향을 따라 향하는 점의 극소 변위의 곱과 동일한 스칼라 양으로 정의됩니다. 접선.
최종 변위에 대한 강제 작업
최종 변위에 대한 힘의 작업은 기본 섹션에 대한 작업의 합과 같습니다.
최종 변위 M 1 M 0 에 대한 힘의 일은 기본 일에서 이 변위를 따라 적분하는 것과 같습니다.
변위 M 1 M 2에 대한 힘의 작용은 가로축으로 둘러싸인 그림의 영역, M 1 및 M 0 점에 해당하는 곡선 및 세로 좌표로 표시됩니다.
SI 1(J)의 작업력 및 운동 에너지 측정 단위.
강제 작업 정리
정리 1... 특정 변위에서 합력의 일은 동일한 변위에서 구성력의 일의 대수적 합과 같습니다.
정리 2.결과 변위에 대한 일정한 힘의 일은 구성 요소 변위에 대한 이 힘의 일의 대수적 합과 같습니다.
힘
힘은 단위 시간당 힘의 일을 결정하는 양입니다.
전력 측정 단위는 1W = 1J/s입니다.
힘의 작용을 결정하는 경우
내부 세력의 작용
변위에 대한 강체의 내부 힘의 작업 합계는 0과 같습니다.
중력의 일
탄성력 작업
마찰력 작용
회전체에 작용하는 힘의 작용
고정 축을 중심으로 회전하는 강체에 가해지는 힘의 기본 일은 회전 각도의 증분만큼 회전 축에 대한 외력의 주 모멘트의 곱과 같습니다.
회전 저항
고정 실린더와 평면의 접촉 영역에서 접촉 압축의 국부 변형이 발생하고 응력은 타원 법칙에 따라 분포되며 이러한 응력의 결과 N의 작용선은 작용선과 일치합니다. 실린더에 가해지는 하중 Q. 실린더가 전복되면 하중 분포가 비대칭이 되어 최대가 운동 방향으로 이동합니다. 결과 N은 값 k에 의해 변위됩니다. 회전 마찰력의 암은 회전 마찰 계수라고도 하며 길이(cm)의 치수를 갖습니다.
물질 점의 운동 에너지 변화에 대한 정리
일부 변위에서 재료 점의 운동 에너지 변화는 동일한 변위에서 점에 작용하는 모든 힘의 로봇 대수 합과 같습니다.
기계 시스템의 운동 에너지 변화에 대한 정리
특정 변위에서 기계 시스템의 운동 에너지 변화는 동일한 변위에서 시스템의 재료 점에 작용하는 로봇의 내부 및 외부 힘의 대수적 합과 같습니다.
강체의 운동 에너지 변화에 대한 정리
특정 변위에서 강체(변경되지 않은 시스템)의 운동 에너지 변화는 동일한 변위에서 시스템의 점에 작용하는 로봇의 외력의 합과 같습니다.
능률
메커니즘에 작용하는 힘
메커니즘 또는 기계에 적용되는 힘 및 힘 쌍(모멘트)은 그룹으로 나눌 수 있습니다.
1. 긍정적인 작업을 수행하는 구동력 및 모멘트(예: 내연 기관에서 피스톤의 가스 압력과 같이 구동 링크에 적용됨).
2. 부정적인 작업을 수행하는 힘과 저항의 순간:
- 유용한 저항 (기계에서 필요한 작업을 수행하고 종동 링크에 적용됩니다, 예를 들어 기계에 의해 들어 올려지는 하중의 저항),
- 저항력(예: 마찰력, 공기 저항 등).
3. 중력과 스프링의 탄성력(양의 작용과 음의 작용, 전체 사이클의 작용은 0임).
4. 외부에서 몸체나 랙에 가해지는 힘과 모멘트(기초의 반작용 등)는 일을 하지 않는다.
5. 운동학적 쌍으로 작용하는 링크 사이의 상호작용의 힘.
6. 링크의 관성력은 가속도에 따른 링크의 질량과 움직임으로 인해 긍정적이고 부정적인 작업을 수행할 수 있으며 작업을 수행하지 않을 수 있습니다.
메커니즘에서 힘의 작용
기계의 정상 상태 작동에서 운동 에너지는 변하지 않으며 가해진 구동력과 저항력의 작업 합계는 0과 같습니다.
기계를 작동시키는 데 드는 작업은 유용하고 유해한 저항을 극복하는 데 사용됩니다.
메커니즘의 효율성
정상 상태 기계적 효율은 비율과 같습니다. 유용한 작업기계를 움직이게 하는 데 소요되는 작업에 대한 기계:
기계 요소는 직렬, 병렬 및 혼합으로 연결할 수 있습니다.
직렬 연결의 효율성
메커니즘의 직렬 연결을 사용하면 개별 메커니즘의 효율성이 가장 낮을수록 전체 효율성이 떨어집니다.
병렬 연결을 통한 효율성
메커니즘의 병렬 연결을 통해 전체 효율은 개별 메커니즘의 최저 효율보다 크고 최고 효율보다 낮습니다.
형식: PDF
언어: 러시아어, 우크라이나어
평 기어 계산의 예
평기어 계산의 예. 재료 선택, 허용 응력 계산, 접촉 및 굽힘 강도 계산이 수행되었습니다.
빔 굽힘 문제 해결의 예
예에서 전단력 및 굽힘 모멘트의 다이어그램이 구성되고 위험한 단면이 발견되고 I-빔이 선택됩니다. 이 작업은 차동 종속성을 사용하여 다이어그램 구성을 분석하고 빔의 다양한 단면에 대한 비교 분석이 수행됩니다.
샤프트 비틀림 문제 해결의 예
작업은 주어진 직경, 재료 및 허용 응력에 대한 강철 샤프트의 강도를 확인하는 것입니다. 솔루션 중에 토크, 전단 응력 및 비틀림 각도의 다이어그램이 표시됩니다. 샤프트의 자중은 고려되지 않습니다.
막대의 장력 압축 문제를 해결하는 예
작업은 주어진 허용 응력에서 철근의 강도를 확인하는 것입니다. 솔루션 과정에서 세로 방향 힘, 수직 응력 및 변위의 다이어그램이 표시됩니다. 바의 자체 무게는 고려되지 않습니다.
운동 에너지 보존 정리의 적용
기계 시스템의 운동 에너지 보존에 대한 정리의 적용에 대한 문제를 해결하는 예
에너지스칼라 물리량은 물질의 다양한 형태의 운동에 대한 단일 측정이자 한 형태에서 다른 형태로의 물질 운동의 전환에 대한 측정입니다.
다양한 형태의 물질 운동을 특성화하기 위해 기계적, 내부적, 정전기적 에너지, 핵내 상호 작용 등과 같은 적절한 유형의 에너지가 도입됩니다.
에너지는 자연의 가장 중요한 법칙 중 하나인 보존 법칙을 따릅니다.
역학적 에너지 E는 물체의 움직임과 상호작용을 특징짓고 물체의 속도와 상호 배열의 함수입니다. 운동 에너지와 위치 에너지의 합과 같습니다.
운동 에너지
질량이 있는 몸체의 경우를 고려하십시오. 미디엄일정한 힘 \ (~ \ vec F \) (여러 힘의 결과일 수 있음)이 있고 힘 벡터 \ (~ \ vec F \) 및 변위 \ (~ \ vec s \)는 하나의 직선을 따라 향합니다. 한 방향으로 선. 이 경우 힘의 일은 다음과 같이 정의할 수 있습니다. NS = NS∙NS... 뉴턴의 제2법칙에 따른 힘의 계수는 NS = ㅇ ㅇ및 변위 모듈 NS균일하게 가속된 직선 운동은 초기 모듈과 연관됩니다. υ 1 및 최종 υ 2 속도 및 가속도 NS식 \ (~ s = \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) \).
여기에서 작업을 위해 우리는 다음을 얻습니다.
\ (~ A = F \ cdot s = m \ cdot a \ cdot \ frac (\ upsilon ^ 2_2 - \ upsilon ^ 2_1) (2a) = \ frac (m \ cdot \ upsilon ^ 2_2) (2) - \ frac (m \ cdot \ upsilon ^ 2_1) (2) \). (1)
물체의 질량을 속도의 제곱으로 곱한 값의 절반에 해당하는 물리량을 신체의 운동 에너지.
운동 에너지는 문자로 표시됩니다. 이자형케이.
\ (~ E_k = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (2)
그러면 등식(1)은 다음과 같이 쓸 수 있습니다.
\ (~ A = E_ (k2) - E_ (k1) \). (삼)
운동 에너지 정리
신체에 적용된 합력의 일은 신체의 운동 에너지의 변화와 같습니다.
운동에너지의 변화는 힘(3)의 일과 같기 때문에 몸의 운동에너지는 일과 같은 단위, 즉 줄(Joule)로 표현된다.
질량이 있는 물체의 초기 운동 속도 미디엄는 0이고 몸체는 값으로 속도를 증가시킵니다. υ , 힘의 일은 신체의 운동 에너지의 최종 값과 같습니다.
\ (~ A = E_ (k2) - E_ (k1) = \ frac (m \ cdot \ upsilon ^ 2) (2) - 0 = \ frac (m \ cdot \ upsilon ^ 2) (2) \). (4)
운동 에너지의 물리적 의미
속력 υ로 움직이는 물체의 운동 에너지는 이 속력을 주기 위해 정지해 있는 물체에 작용하는 힘에 의해 어떤 일을 해야 하는지를 보여줍니다.
잠재력
잠재력신체 상호 작용의 에너지입니다.
지구 위로 올려진 물체의 위치 에너지는 중력에 의해 물체와 지구가 상호 작용하는 에너지입니다. 탄성적으로 변형된 신체의 위치 에너지는 탄성력에 의해 신체의 개별 부분이 서로 상호 작용하는 에너지입니다.
잠재적 인라고 힘, 그 작업은 움직이는 재료 점 또는 몸체의 초기 및 최종 위치에만 의존하고 궤적의 모양에는 의존하지 않습니다.
닫힌 궤적에서 잠재적인 힘의 일은 항상 0입니다. 잠재적인 힘에는 중력, 탄성력, 정전기력 등이 포함됩니다.
힘궤적의 모양에 따라 달라지는 작업을 가능성이 없는... 재료 점 또는 몸체가 닫힌 궤적을 따라 이동할 때 비잠재력의 일은 0이 아닙니다.
신체와 지구 상호 작용의 잠재적 에너지
중력이 한 일 찾기 NS t 질량이 있는 물체를 움직일 때 미디엄높이에서 수직으로 시간 1 지구 표면 위의 높이까지 시간 2(그림 1). 차이가 있다면 시간 1 – 시간 2는 지구 중심까지의 거리에 비해 무시할 만하고 중력의 힘 NS m 몸이 움직이는 동안 일정하고 동등한 것으로 간주 될 수 있습니다 mg.
변위는 중력 벡터와 방향이 일치하므로 중력 일은
\ (~ A = F \ cdot s = m \ cdot g \ cdot (h_1 - h_2) \). (5)
이제 경사면을 따라 몸의 움직임을 고려합시다. 몸체가 경사면 아래로 이동할 때(그림 2), 중력의 힘 NS티 = m ∙ 지일하는 중
\ (~ A = m \ cdot g \ cdot s \ cdot \ cos \ alpha = m \ cdot g \ cdot h \), (6)
어디 시간- 경사면의 높이, NS- 경사면의 길이와 동일한 변위 계수.

한 점에서 몸의 움직임 V바로 그거죠 와 함께모든 궤적을 따라(그림 3) 다른 높이를 가진 경사면의 섹션을 따라 변위로 구성된 것으로 정신적으로 표현될 수 있습니다. 시간’, 시간'' 등 작업 NS중력 V V 와 함께트랙의 개별 섹션에 대한 작업 합계와 같습니다.
\ (~ A = m \ cdot g \ cdot h "+ m \ cdot g \ cdot h" "+ \ ldots + m \ cdot g \ cdot h ^ n = m \ cdot g \ cdot (h" + h "" + \ ldots + h ^ n) = m \ cdot g \ cdot (h_1 - h_2) \), (7)
어디 시간 1 및 시간 2 - 포인트가 위치한 지구 표면으로부터의 높이 V그리고 와 함께.

등식(7)은 중력의 작용이 물체의 궤적에 의존하지 않고 항상 초기 위치와 최종 위치의 높이 차이에 의한 중력 계수의 곱과 같다는 것을 보여줍니다.
중력의 작용은 아래로 움직일 때 양수이고 위로 움직일 때 음수입니다. 닫힌 경로에서 중력의 일은 0입니다.
등식(7)은 다음과 같이 나타낼 수 있습니다.
\ (~ A = - (m \ cdot g \ cdot h_2 - m \ cdot g \ cdot h_1) \). (여덟)
자유낙하 가속도 계수와 신체가 지표면 위로 들어 올려진 높이의 곱과 같은 물리량을 신체 질량이라고 합니다. 잠재력몸과 지구의 상호 작용.
질량이 있는 물체를 움직일 때의 중력의 작용 미디엄높이에 위치한 지점에서 시간 2, 높이에 위치한 점으로 시간 1 지구 표면에서 모든 궤적을 따라 반대 부호로 취한 신체와 지구 사이의 상호 작용의 잠재적 에너지 변화와 같습니다.
\ (~ A = - (E_ (p2) - E_ (p1)) \). (아홉)
위치 에너지는 문자로 표시됩니다. 이자형 NS.
지구 위로 올려진 신체의 위치 에너지 값은 0 레벨, 즉 위치 에너지가 0으로 간주되는 높이의 선택에 따라 다릅니다. 일반적으로 지구 표면에 있는 신체의 위치 에너지는 0이라고 가정합니다.
0 레벨을 선택하면 위치 에너지가 이자형높이에서 몸의 p 시간지구 표면 위의 무게는 중력 가속도 계수에 의한 몸체 질량 m의 곱과 같습니다. NS그리고 거리 시간그것은 지구 표면에서 :
\ (~ E_p = m \ cdot g \ cdot h \). (십)
신체와 지구 상호 작용의 잠재적 에너지의 물리적 의미
중력에 의해 작용하는 신체의 위치 에너지는 신체가 0 레벨로 이동할 때 중력이 한 일과 같습니다.
양의 값만 가질 수 있는 병진 운동의 운동 에너지와 달리 신체의 위치 에너지는 양과 음이 될 수 있습니다. 체질량 미디엄고도에서 시간, 어디 시간 < 시간 0 (시간 0 - 높이 0), 음의 위치 에너지를 가짐:
\ (~ E_p = -m \ cdot g \ cdot h \).
중력 상호 작용의 잠재적 에너지
질량과 두 물질 점의 시스템의 중력 상호 작용의 잠재적 에너지 미디엄그리고 미디엄멀리서 NS서로 같음
\ (~ E_p = G \ cdot \ frac (M \ cdot m) (r) \). (열하나)
어디 NS중력 상수이고 위치 에너지의 0( 이자형 p = 0)에서 채택 NS = ∞.
질량과 물체의 중력 상호 작용의 잠재적 에너지 미디엄지구와 함께 시간- 지구 표면 위의 신체 높이, 미디엄 e는 지구의 질량, NS e는 지구의 반지름이고 위치 에너지의 0은 다음에서 선택됩니다. 시간 = 0.
\ (~ E_e = G \ cdot \ frac (M_e \ cdot m \ cdot h) (R_e \ cdot (R_e + h)) \). (12)
영 기준을 선택하는 동일한 조건에서 물체와 질량의 중력 상호 작용의 위치 에너지 미디엄낮은 높이를 위해 지구와 함께 시간 (시간 « NS e) 같음
\ (~ E_p = m \ cdot g \ cdot h \),
여기서 \ (~ g = G \ cdot \ frac (M_e) (R ^ 2_e) \)는 지구 표면 근처의 중력 가속도 계수입니다.
탄력적으로 변형된 신체의 위치 에너지
스프링의 변형(신율)이 어떤 초기값에서 변할 때 탄성력이 한 일을 계산해 보자. NS 1에서 최종 값까지 NS 2 (그림 4, b, c).

탄성력은 스프링이 변형됨에 따라 변합니다. 탄성력의 일을 찾기 위해 힘의 계수의 평균값을 취할 수 있습니다(탄성력은 선형적으로 의존하기 때문에 NS) 변위 계수를 곱합니다.
\ (~ A = F_ (upr-cp) \ cdot (x_1 - x_2) \), (13)
여기서 \ (~ F_ (upr-cp) = k \ cdot \ frac (x_1 - x_2) (2) \). 여기에서
\ (~ A = k \ cdot \ frac (x_1 - x_2) (2) \ cdot (x_1 - x_2) = k \ cdot \ frac (x ^ 2_1 - x ^ 2_2) (2) \) 또는 \ (~ A = - \ 왼쪽 (\ frac (k \ cdot x ^ 2_2) (2) - \ frac (k \ cdot x ^ 2_1) (2) \ 오른쪽) \). (십사)
물체의 강성을 변형의 제곱으로 곱한 값의 절반에 해당하는 물리량을 잠재력탄력적으로 변형된 몸체:
\ (~ E_p = \ frac (k \ cdot x ^ 2) (2) \). (15)
공식 (14)와 (15)로부터 탄성력의 일은 반대 부호로 취한 탄성 변형체의 위치 에너지 변화와 같다는 것을 알 수 있습니다.
\ (~ A = - (E_ (p2) - E_ (p1)) \). (16)
만약에 NS 2 = 0 및 NS 1 = NS, 그러면 식 (14)와 (15)에서 알 수 있듯이,
\ (~ E_p = A \).
변형된 신체의 위치 에너지의 물리적 의미
탄성 변형된 물체의 위치 에너지는 물체가 변형이 0인 상태로 전이되는 동안 탄성력에 의해 수행된 일과 같습니다.
위치 에너지는 상호 작용하는 물체를 특성화하고 운동 에너지는 움직이는 물체를 특성화합니다. 위치 에너지와 운동 에너지는 모두 물체에 작용하는 힘이 0 이외의 일을 수행하는 물체의 상호 작용의 결과로만 변경됩니다. 닫힌 시스템을 형성하는 신체의 상호 작용 중 에너지 변화에 대한 질문을 고려해 보겠습니다.
폐쇄 시스템외부 힘의 영향을 받지 않거나 이러한 힘의 작용이 보상되는 시스템입니다.... 여러 물체가 중력과 탄성력에 의해서만 서로 상호 작용하고 외부 힘이 작용하지 않으면 물체의 상호 작용에 대해 탄성력 또는 중력의 작용은 물체의 위치 에너지의 변화와 같습니다. 반대 기호로 찍은:
\ (~ A = - (E_ (p2) - E_ (p1)) \). (17)
운동 에너지 정리에 따르면 동일한 힘의 일은 운동 에너지의 변화와 같습니다.
\ (~ A = E_ (k2) - E_ (k1) \). (십팔)
등식 (17)과 (18)을 비교하면 닫힌 시스템에서 물체의 운동 에너지 변화는 물체 시스템의 위치 에너지 변화와 절대값이 같고 반대임을 알 수 있습니다 그것에 서명:
\ (~ E_ (k2) - E_ (k1) = - (E_ (p2) - E_ (p1)) \) 또는 \ (~ E_ (k1) + E_ (p1) = E_ (k2) + E_ (p2) \). (19)
기계 공정의 에너지 보존 법칙:
닫힌 시스템을 구성하고 중력과 탄성력에 의해 서로 상호 작용하는 물체의 운동 에너지와 위치 에너지의 합은 일정하게 유지됩니다.
물체의 운동에너지와 위치에너지의 합은 다음과 같다. 완전한 기계적 에너지.
주자 가장 간단한 경험... 강철 공을 던지자. 초기 속도 υ 시작을 알리면 운동 에너지를 주므로 위쪽으로 상승하기 시작합니다. 중력의 작용은 공의 속도를 감소시키고 따라서 운동 에너지를 감소시킵니다. 그러나 공은 점점 더 높이 올라가고 점점 더 많은 위치 에너지를 획득합니다( 이자형피 = m ∙ g ∙ h). 따라서 운동 에너지는 흔적 없이 사라지지 않고 위치 에너지로 변환됩니다.
궤적의 정점에 도달하는 순간( υ = 0) 공에 운동 에너지가 완전히 박탈됨( 이자형 k = 0), 그러나 동시에 위치 에너지는 최대가 됩니다. 그런 다음 공은 운동 방향을 변경하고 속도가 증가하면서 아래쪽으로 이동합니다. 이제 위치 에너지가 운동 에너지로 역변환됩니다.
에너지 보존 법칙은 다음을 보여줍니다. 물리적 의미개념 일하다:
중력과 탄성력의 작용은 한편으로는 운동 에너지의 증가와 같고 다른 한편으로는 신체의 잠재적 에너지 감소와 같습니다. 결과적으로 일은 한 유형에서 다른 유형으로 변경된 에너지와 같습니다.
기계적 에너지 변경법
상호 작용하는 신체 시스템이 닫혀 있지 않으면 기계적 에너지가 보존되지 않습니다. 이러한 시스템의 기계적 에너지 변화는 외부 힘의 작용과 같습니다.
\ (~ A_ (vn) = \ 델타 E = E - E_0 \). (스물)
어디 이자형그리고 이자형 0 - 각각 최종 및 초기 상태에서 시스템의 총 기계적 에너지.
이러한 시스템의 예는 잠재적인 힘과 함께 비잠재력이 작용하는 시스템입니다. 비잠재력에는 마찰력이 포함됩니다. 대부분의 경우 마찰력 사이의 각도가 NS NS몸은 π 라디안, 마찰력의 일은 음수이며 다음과 같습니다.
\ (~ A_ (tr) = -F_ (tr) \ cdot s_ (12) \),
어디 NS 12 - 점 1과 2 사이의 몸체 경로.
시스템이 움직이는 동안 마찰력은 운동 에너지를 감소시킵니다. 결과적으로 닫힌 비 보수 시스템의 기계적 에너지는 항상 감소하여 비 기계적 형태의 운동 에너지로 바뀝니다.
예를 들어, 도로의 수평 단면을 따라 움직이는 자동차는 엔진을 끈 후 마찰력의 영향으로 일정 거리를 이동하고 멈춥니다. 차량 병진운동의 운동에너지는 0이 되었고 위치에너지는 증가하지 않았다. 차량을 제동하는 동안 브레이크 패드, 차량 타이어 및 아스팔트가 가열되었습니다. 결과적으로 마찰력의 작용으로 자동차의 운동 에너지는 사라지지 않고 분자의 열 운동의 내부 에너지로 바뀌었습니다.
에너지 보존 및 변환의 법칙
모든 물리적 상호 작용에서 에너지는 한 형태에서 다른 형태로 변환됩니다.
때로는 마찰력 사이의 각도 NS tr 및 기본 변위 Δ NS는 0이고 마찰력의 일은 양수입니다.
\ (~ A_ (tr) = F_ (tr) \ cdot s_ (12) \),
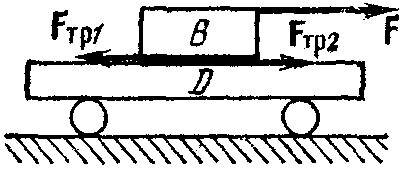
실시예 1... 하자, 외력 NS바에서 행동하다 V카트 위에서 미끄러질 수 있는 NS(그림 5). 캐리지가 오른쪽으로 이동하면 슬라이딩 마찰력의 작용 NS막대 측면에서 트롤리에 작용하는 tr2는 양수입니다.
실시예 2... 바퀴가 굴러갈 때 바퀴의 수평면과의 접촉점이 바퀴의 움직임 방향과 반대 방향으로 움직이고 마찰력의 일은 양수이기 때문에 바퀴의 구름 마찰력은 움직임을 따라 향합니다. (그림 6):

문학
- OF 카바딘 물리학: Ref. 자료: 교과서. 학생들을 위한 매뉴얼. - M .: 교육, 1991 .-- 367 p.
- 키코인 I.K., 키코인 A.K. 물리학: 교과서. 9 cl. 수요일 쉬크. - M .: Pro-sveshenie, 1992 .-- 191 p.
- 초등 물리학 교과서: 교과서. 용돈. 3권 / Ed. G.S. Landsberg: vol.1. 역학. 열. 분자 물리학. - M .: Fizmatlit, 2004 .-- 608 p.
- Yavorskiy B.M., Seleznev Yu.A. 대학 지원자 및 독학을 위한 물리학 참고서. - M .: Nauka, 1983 .-- 383 p.